Chrysler (7-Z0166) Project

Contents

OEM Test: Chrysler Dual Wire High Speed CAN
Specification: 7-Z0166
Transceiver: Configuration 1 DWCAN
Project: MxPLTChrysler.zip
1.Open Mx‑VDev. 2.Select File-> Open->Project from the main menu. 3.Use the Open dialog to select the project file: MxPLTChrysler\MxPLT Sample Project Chrysler.mxp 4.Click Open. 5.Click Edit Harness ( 6.In Mx‑TransIt, click on the PLT Test Manager Transform to select it and display its Properties box. 7.Click the “Launch MxPLTConversionTool” verb to open the tool. 8.Select the “TestCase Generation” tab to generate Scenarios and TestCases dynamically based on selected inputs.
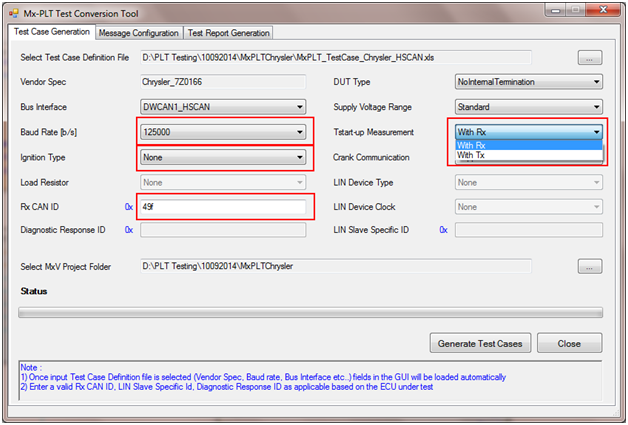
9.Following are the inputs for the TestCase Generation tab of the MxPLT tool. a.Select TestCase Definition File. Click the browse button ( b.DUT Type: If the DUT does not have a 120 ohms termination resistor, select “No Internal Termination”. If the DUT has an internal 120 ohms resister, select "Internal Termination_120Ohms". c.Change the Baud Rate as per DUT type. d.Select the Supply Voltage Range as per DUT supported voltage ranges “Standard” (9V to 16V) or “Extended” (6V to 26.5V). e.Select Tstart-up Measurement: •Select "With Rx" to measure the start-up time between first received message from DUT and fault removal time. •Select "With Tx" to measure the start-up time between first successful transmit message from PLT and fault removal time. In this case, PLT transmits an additional TEST message (0x111) with 10 ms periodicity from just before fault removal up to 3 sec. f.Select Crank Communication. If the DUT supports communication during crank, select “Supported,” otherwise select the “Not Supported” option. g.Select Ignition Type. •Select “Input High” if the DUT wakes-up with 12V – 14V on ignition line. •Select type as “Input Low” if DUT wakes-up with 0V on ignition line. •Select type as “None” if DUT wakes-up with Vbatt itself. h.Enter a valid CAN Rx Id, which is received from ECU, this Rx id will used to trigger and display the waveform. i.Click the browse button ( 10.Click the Generate TestCases button to generate Scenarios and TestCases for a specific OEM. 11.Select the Message Configuration tab. 12.Configured default messages are displayed and user can edit the messages as applicable based on the ECU under test. This message is used to wake up the DUT and to continue the ECU communication (BCM message).
13.Click the “Save Configuration” button. Observe the “XML file successfully generated” message status. Note: The CAN Configuration file path is the same as selected MxV Project folder path in the “TestCase generation” tab. 14.Close the Test Conversion Tool, but leave MxVDev running. |

1.Open MxVDev. 2.Select File-> Open->Project from the main menu.
3.Use the Open dialog to select the following project file: MxPLT Sample Project Chrysler.mxp
4.Click Open. 5.The generated Scenarios and TestCases are displayed in the Project Explorer:
6.Select Tools-> Regression Test ->New.
7.Click the Add button in the Regression Command File dialog:
8.Enter User Details (Optional) in the Test Info panel. Click Next.
9.Click Next in Regression Output Wizard. 10. Click Next in Distribution List. 11. Click Next in Execution Options. 12. In Scenario Query Builder, expand the tree of the NoInternalTermination folder. Select a Scenario (such as: "7.1.1 Recessive Output Voltage Levels.mxs") and click Next.
13. Click Finish to open the Save Regression Script dialog:
14. Save the Regression Script (.mxreg) file. 15. Click the "Close and Run" button in the Regression Command File window.
The Regression Test Progress window shows the progress of Regression Test and pass/fail information for the selected Scenario.
After completion of the Regression Test, the report is automatically displayed. |










Test Name |
Test Description |
Observation |
|---|---|---|
7.1.1 Recessive signal voltage levels |
To measure CAN bus signal voltage level as to recessive state. |
Observe RecVCanH,RecVCanL, RecVdiff Signals for Recessive OutputVoltageLevels. Acceptance Criteria: MIN MAX RecVCanH --> 2.0V 3.0V RecVCanL --> 2.0V 3.0V RecVdiff --> -500mv +50mv |
7.1.2 Dominant signal voltage levels |
To measure CAN bus signal voltage level as to dominant state |
|
7.1.2 Domnt OutPut Vtg Lvl TstCase1 |
To measure the Dominant Signal voltage levels |
Observe DomVCanH,DomVCanL, DomVdiff, DomVcm Signals Acceptance Criteria: MIN MAX DomVCanH --> 2.75V 4.5V DomVCanL --> 0.5V 2.25V DomVdiff --> 1.5V 3.0V |
7.2.1 Internal Resistance Of CANH and CANL |
To measure CANH and CANL internal resistance |
|
7.2.1 Intrnl Resistance Scope1 U 0V |
To measure the Internal Resistance of CANH & CANL, When the voltage level of U at 0V. |
Observe RinCanH, RinCanL,deltaRin Acceptance Criteria: MIN MAX RinCanH --> 5kΩ 50KΩ RinCanL --> 5kΩ 50KΩ deltaRin --> -3 3 |
7.2.1 Intrnl Resistance Scope1 U 5V |
To measure the Internal Resistance of CANH & CANL, When the voltage level of U at 5V. |
Observe RinCanH, RinCanL,deltaRin Acceptance Criteria: MIN MAX RinCanH --> 5kΩ 50KΩ RinCanL --> 5kΩ 50KΩ deltaRin --> -3 3 |
7.2.1 Intrnl Resistance Scope2 U 5V |
To measure the Internal Resistance of CANH & CANL, When the voltage level of U at 5V. |
Observe RinCanH, RinCanL,deltaRin Acceptance Criteria: MIN MAX RinCanH --> 5kΩ 50KΩ RinCanL --> 5kΩ 50KΩ deltaRin --> -3 3 |
7.2.1 Intrnl Resistance Scope3 U 5V |
To measure the Internal Resistance of CANH & CANL, When the voltage level of U at 5V. |
Observe RinCanH, RinCanL,deltaRin Acceptance Criteria: MIN MAX RinCanH --> 5kΩ 50KΩ RinCanL --> 5kΩ 50KΩ deltaRin --> -3 3 |
7.2.2 Internal differential resistance |
To measure internal differential resistance of DUT. |
Observe Rdiff Acceptance Criteria: MIN MAX Rdiff --> 10kΩ 100KΩ |
7.3.1 Power supply voltage level. |
To define power supply voltage min. and max. level for a correct communication through bus. |
|
7.3.1 Min Max Power Supply Extended |
To define power supply voltage min. and max. level for a correct communication through bus. |
Acceptance Criteria: check if DUT can transmit and receive frames within a 18 V and to 6V or 10V (depending on the supply class node) power supply voltage range. |
7.3.1 Min Max Power Supply Standard |
To define power supply voltage min. and max. level for a correct communication through bus. |
Acceptance Criteria: check if DUT can transmit and receive frames within a 18 V and to 6V or 10V (depending on the supply class node) power supply voltage range. |
7.3.2 Engine start-up voltage curve |
To check if start-up procedure is performed correctly at voltage drop |
|
7.3.2 Comm during Crank Supported |
To check if start-up procedure is performed correctly at voltage drop |
Acceptance Criteria: The DUT must resume bus communication by Tstart-up ms (see system specifications) after the power voltage has reached a level of 6.5V |
7.3.2 Comm during Crank Not Supported |
To check if start-up procedure is performed correctly at voltage drop |
Acceptance Criteria: The DUT must resume bus communication by Tstart-up ms (see system specifications) after the power voltage has reached a level of 10.5V |
7.4 Signal Characteristics |
To check symmetry for both CAN bus signal under different load conditions. |
|
7.4 Signal Char Symmetric Min Load |
To check symmetry for both CAN bus signal under Minimum load conditions. |
Acceptance Criteria: No asymmetric performances/oscillations are present – In the first half of bit time, bus output level to be within 81% and 150% of d.c. valuate at bit fall – In the second half of bit time, bus output level to be within 95% and 105% of d.c. valuate at bit fall. |
7.4 Signal Char Symmetric Max Load |
To check symmetry for both CAN bus signal under Maximum load conditions. |
Acceptance Criteria: No asymmetric performances/oscillations are present – In the first half of bit time, bus output level to be within 81% and 150% of d.c. valuate at bit fall – In the second half of bit time, bus output level to be within 95% and 105% of d.c. valuate at bit fall. |
7.5 Time bit accuracy at message transmission |
To define time bit accuracy at DUT message transmission |
|
7.5 Bit time precision during msg tx |
To define time bit accuracy at DUT message transmission Note: The configured message should have maximum DLC and also fixed data bytes value as per specification. |
Acceptance Criteria: Check that oscillator deviation and time bit deviation are within prescribed value and less than +/-0.3%. |
7.6.1 Immunity test to potential mass deviations |
To define immunity test to potential ground deviations. |
|
7.6.1 Immunity Test To Potential Mass Deviations Method 1 TstCase 1 |
Expose the DUT to ground offset levels of 4.5 V maximum. |
Acceptance Criteria: Measure the ground deviation value where the first error frame occurs.
Min Max VOffstCommErr 0 4.5 |
7.6.1 Immunity Test To Potential Mass Deviations Method 2 TstCase 1 |
Expose the DUT to ground offset levels of 4.5 V maximum. |
Acceptance Criteria: Measure the ground deviation value where the first error frame occurs.
Min Max VOffstCommErr 0 4.5 |
7.6.2 Immunity test to power drop |
To define DUT immunity to power loss |
|
7.6.2 Immunity Test To Power Drop TstCase 1 |
To define DUT immunity to power loss |
Acceptance Criteria: As soon as power supply is restored, standard operation shall be recovered automatically within Tstart-up ms |
7.6.3 Immunity Test To Ground Drop |
To define DUT immunity to ground loss. |
|
7.6.3 Immunity Test To Ground Drop TstCase1 |
To define DUT immunity to ground loss. |
Acceptance Criteria: As soon as ground connection is restored, standard operation shall be recovered automatically within Tstart-up ms |
7.6.4 Immunity test at CANH and/or CANL interruption |
To define DUT immunity at CANH and/or CANL interruption. |
|
7.6.4 Immunity Test Of CANH Interruption TstCase 1 |
To define DUT immunity at CANH and/or CANL interruption. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.5 Immunity test at short to battery of CANH and CANL |
To define DUT immunity at CANH and/or CANL short to battery |
|
7.6.5 CANH shrt To 18V TstCase 1 |
To Monitor the behavior of the DUT when CANH short to supply of 18V. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.5 CANL shrt To 18V TstCase 1 |
To Monitor the behavior of the DUT when CANL short to supply of 18V. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.5 CANH shrt To 26.5V TstCase 1 |
To Monitor the behavior of the DUT when CANH short to supply of 26.5V. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.5 CANL shrt To 26.5V TstCase 1 |
To Monitor the behavior of the DUT when CANH short to supply of 26.5V. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.6 Immunity Test At Short To Ground Of CANH and CANL |
To define DUT immunity at CANH and/or CANL short to ground |
|
7.6.6 CANH shrt To Gnd TstCase 1 |
To Monitor the behavior of the DUT when CANH short to GND. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.6 CANL shrt To Gnd TstCase 1 |
To Monitor the behavior of the DUT when CANH short to GND. |
Acceptance Criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |
7.6.7 Immunity Test At Short Of CANH To CANL |
To define DUT immunity at CANH short to CANL |
|
7.6.7 Shrt between CAN wires TstCase 1 |
To Monitor the behavior of the DUT when CANH & CanL are shorted . |
Acceptance criteria: As soon as the trouble is cleared, standard operation shall be recovered automatically within Tstart-up ms |